601 線形計画法¶
\begin{align}
\text{minimize } c^Tx & \\
\text{subject to } Ax &\le b \\
\text{where } & A \in R^{n \times m}_+, \\
& x \in R^m_{++}, \\
& b \in R^n_+, \\
& c \in R^m_+.
\end{align}
アプリケーション:トンコケ丼¶
- 決定変数:トンコケ丼の数\(x_1\)杯,コケトン丼の数\(x_2\)杯,ミックス丼の数\(x_3\)杯
- 目的関数:利益最大化 トンコケ丼 1500円/杯,コケトン丼 1800円/杯,ミックス丼 3000円/杯
- 制約式:材料 豚肉60 \(\times 10^2\)g/day,鶏肉60 \(\times 10^2\)g/day,牛肉20 \(\times 10^2\)g/day,
\begin{align}
\text{maximize } 15x_1 + 18x_2 + 30x_3,& \\
\text{subject to } 2x_1 +x_2 + x_3 &\le 60, \\
x_1 +2x_2 + x_3 &\le 60, \\
x_3 &\le 30, \\
x_1,x_2,x_3 &\ge 0, \\
\text{where } A =\begin{bmatrix}
2 & 1 & 1 \\
1 & 2 & 1 \\
0 & 0 & 1
\end{bmatrix}, \\
x = \begin{bmatrix}
x_1 \\
x_2 \\
x_3
\end{bmatrix}, \\
b = \begin{bmatrix}
60 \\
60 \\
30
\end{bmatrix}, \\
c = \begin{bmatrix}
15 \\
18 \\
30
\end{bmatrix}.
\end{align}
読み込み¶
In [1]:
import sympy as sy
import numpy as np
import multiprocessing as mp
import gurobipy as gp
import pandas as pd
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
% matplotlib inline
import warnings
warnings.filterwarnings("ignore")
LP不等式標準形のテンプレートを用意¶
In [2]:
n = 3
m = 3
A = sy.Matrix(n, m, sy.symbols('A:{}:{}'.format(n, m)))
x = sy.Matrix(m, 1, sy.symbols('x:{}:1'.format(m)))
b = sy.Matrix(n, 1, sy.symbols('b:{}:1'.format(n)))
c = sy.Matrix(m, 1, sy.symbols('c:{}:1'.format(m)))
objective_function = c.T*x
constraints = A*x-b
display(A, x, b, c, objective_function, constraints)
Matrix([
[A00, A01, A02],
[A10, A11, A12],
[A20, A21, A22]])
Matrix([
[x00],
[x10],
[x20]])
Matrix([
[b00],
[b10],
[b20]])
Matrix([
[c00],
[c10],
[c20]])
Matrix([[c00*x00 + c10*x10 + c20*x20]])
Matrix([
[A00*x00 + A01*x10 + A02*x20 - b00],
[A10*x00 + A11*x10 + A12*x20 - b10],
[A20*x00 + A21*x10 + A22*x20 - b20]])
具体的なパラメータの挿入¶
In [3]:
def assign_parameter(arg):
nn, mm, name = arg
return ('{}{}{}'.format(name, nn, mm), param_dict[name][nn][mm])
def make_matrix_parallel(func, position_lists):
pool = mp.Pool(processes=mp.cpu_count() - 1)
res_list = pool.map(func, position_lists)
pool.close()
pool.join()
return res_list
param_dict = {}
param_dict['A'] = [[2, 1, 1],
[1, 2, 1],
[0, 0, 1]]
param_dict['b'] = [[60],
[60],
[30]]
param_dict['c'] = [[15],
[18],
[30]]
position_lists = [(nn, mm, 'A') for nn in range(n) for mm in range(m)]+[(nn, 0, 'b') for nn in range(n)]
constr_params = make_matrix_parallel(assign_parameter, position_lists)
obj_params = make_matrix_parallel(assign_parameter, [(mm, 0, 'c') for mm in range(m)])
constraints_with_param = constraints.subs(constr_params)
objective_with_param = objective_function.subs(obj_params)
display(objective_with_param, constraints_with_param)
Matrix([[15*x00 + 18*x10 + 30*x20]])
Matrix([
[2*x00 + x10 + x20 - 60],
[x00 + 2*x10 + x20 - 60],
[ x20 - 30]])
LPモデル構築¶
In [4]:
model = gp.Model('Tonkoke')
for var_name in x:
model.addVar(lb=0, ub=gp.GRB.INFINITY, name=str(var_name))
model.update()
for const in constraints_with_param:
lhs = gp.LinExpr(0)
#Only work for linear expression
for key, value in const.as_coefficients_dict().items():
if key not in x:
lhs += value
else:
lhs.add(model.getVarByName(str(key)), value)
model.addConstr(lhs, gp.GRB.LESS_EQUAL, 0, name='')
obj = gp.LinExpr(0)
for key, value in objective_with_param[0].as_coefficients_dict().items():
if key not in x:
obj += value
else:
obj.add(model.getVarByName(str(key)), value)
model.setObjective(obj, gp.GRB.MAXIMIZE)
model.update()
output_file = 'tonkoke.lp'
model.write(output_file)
print(open(output_file).read())
\ Model Tonkoke
\ LP format - for model browsing. Use MPS format to capture full model detail.
Maximize
15 x00 + 18 x10 + 30 x20
Subject To
R0: 2 x00 + x10 + x20 <= 60
R1: x00 + 2 x10 + x20 <= 60
R2: x20 <= 30
Bounds
End
最適化計算の実行¶
In [5]:
model.optimize()
Optimize a model with 3 rows, 3 columns and 7 nonzeros
Coefficient statistics:
Matrix range [1e+00, 2e+00]
Objective range [2e+01, 3e+01]
Bounds range [0e+00, 0e+00]
RHS range [3e+01, 6e+01]
Presolve removed 1 rows and 0 columns
Presolve time: 0.03s
Presolved: 2 rows, 3 columns, 6 nonzeros
Iteration Objective Primal Inf. Dual Inf. Time
0 1.8000000e+03 3.750000e+00 0.000000e+00 0s
2 1.2300000e+03 0.000000e+00 0.000000e+00 0s
Solved in 2 iterations and 0.04 seconds
Optimal objective 1.230000000e+03
可視化¶
並列化して値を入手¶
In [7]:
func_const_list = []
for const in constraints_with_param:
func_const_list.append(sy.lambdify(x, const, modules='numpy'))
func_obj = sy.lambdify(x, objective_with_param[0], modules='numpy')
def calc_const(arg):
x1, x2, x3 = arg
res = [x1, x2, x3]
for const in func_const_list:
res.append(const(x1, x2, x3))
res.append(None)
return res
def calc_obj(arg):
x1, x2, x3 = arg
res = [x1, x2, x3]
res.append(func_obj(x1, x2, x3))
return res
def calc_parallel(func, x_lists, column_list):
df = pd.DataFrame(columns=column_list)
pool = mp.Pool(processes=mp.cpu_count() - 1)
tmp_df = pd.DataFrame(pool.map(func, x_lists), columns=column_list)
pool.close()
pool.join()
return df.append(tmp_df)
x_min = 0
x_max = 50
x_delta = 1
x_lists = [ (float(x1), float(x2), float(x3))
for x1 in list(range(x_min, x_max, x_delta))
for x2 in list(range(x_min, x_max, x_delta))
for x3 in list(range(x_min, x_max, x_delta))
]
const_df = calc_parallel(calc_const, x_lists, ['x1', 'x2', 'x3', 'eq1', 'eq2', 'eq3', 'obj'])
obj_df = calc_parallel(calc_obj, x_lists, ['x1', 'x2', 'x3', 'obj'])
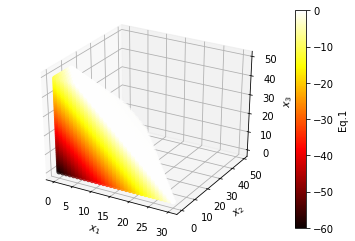
Eq.1¶
In [8]:
eq1 = const_df[(2*const_df.x1+const_df.x2+const_df.x3 -60 <= 0)]
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
p = ax.scatter(eq1['x1'], eq1['x2'], eq1['x3'], c=eq1['eq1'], cmap=plt.hot())
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_zlabel('$x_3$', rotation=90)
fig.colorbar(p, label='Eq.1')
plt.show()
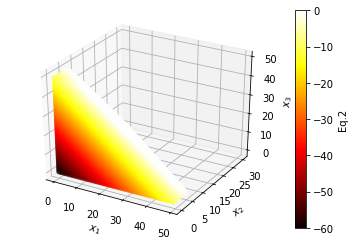
Eq.2¶
In [9]:
eq2 = const_df[(const_df.x1+2*const_df.x2+const_df.x3 -60 <= 0)]
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
p = ax.scatter(eq2['x1'], eq2['x2'], eq2['x3'], c=eq2['eq2'], cmap=plt.hot())
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_zlabel('$x_3$', rotation=90)
fig.colorbar(p, label='Eq.2')
plt.show()
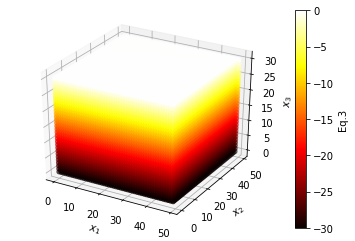
Eq.3¶
In [10]:
eq3 = const_df[(const_df.x3 -30 <= 0)]
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
p = ax.scatter(eq3['x1'], eq3['x2'], eq3['x3'], c=eq3['eq3'], cmap=plt.hot())
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_zlabel('$x_3$', rotation=90)
fig.colorbar(p, label='Eq.3')
plt.show()
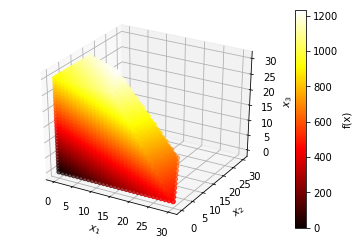
Feasible region and value of objective funciton¶
In [11]:
obj_value = obj_df[(2*const_df.x1+const_df.x2+const_df.x3 -60 <= 0) &
(const_df.x1+2*const_df.x2+const_df.x3 -60 <= 0) &
(const_df.x3 -30 <= 0)]
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
p = ax.scatter(obj_value['x1'], obj_value['x2'], obj_value['x3'], c=obj_value['obj'], cmap=plt.hot())
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_zlabel('$x_3$', rotation=90)
fig.colorbar(p, label='f(x)')
plt.show()
In [12]:
obj_value.sort_values(by='obj', ascending=False)
Out[12]:
| x1 | x2 | x3 | obj | |
|---|---|---|---|---|
| 25530 | 10.0 | 10.0 | 30.0 | 1230.0 |
| 20580 | 8.0 | 11.0 | 30.0 | 1218.0 |
| 23030 | 9.0 | 10.0 | 30.0 | 1215.0 |
| 25480 | 10.0 | 9.0 | 30.0 | 1212.0 |
| 27930 | 11.0 | 8.0 | 30.0 | 1209.0 |
| 15630 | 6.0 | 12.0 | 30.0 | 1206.0 |
| 18080 | 7.0 | 11.0 | 30.0 | 1203.0 |
| 23079 | 9.0 | 11.0 | 29.0 | 1203.0 |
| 25529 | 10.0 | 10.0 | 29.0 | 1200.0 |
| 20530 | 8.0 | 10.0 | 30.0 | 1200.0 |
| 27979 | 11.0 | 9.0 | 29.0 | 1197.0 |
| 22980 | 9.0 | 9.0 | 30.0 | 1197.0 |
| 10680 | 4.0 | 13.0 | 30.0 | 1194.0 |
| 25430 | 10.0 | 8.0 | 30.0 | 1194.0 |
| 27880 | 11.0 | 7.0 | 30.0 | 1191.0 |
| 13130 | 5.0 | 12.0 | 30.0 | 1191.0 |
| 18129 | 7.0 | 12.0 | 29.0 | 1191.0 |
| 30330 | 12.0 | 6.0 | 30.0 | 1188.0 |
| 25578 | 10.0 | 11.0 | 28.0 | 1188.0 |
| 20579 | 8.0 | 11.0 | 29.0 | 1188.0 |
| 15580 | 6.0 | 11.0 | 30.0 | 1188.0 |
| 18030 | 7.0 | 10.0 | 30.0 | 1185.0 |
| 28028 | 11.0 | 10.0 | 28.0 | 1185.0 |
| 23029 | 9.0 | 10.0 | 29.0 | 1185.0 |
| 5730 | 2.0 | 14.0 | 30.0 | 1182.0 |
| 20480 | 8.0 | 9.0 | 30.0 | 1182.0 |
| 25479 | 10.0 | 9.0 | 29.0 | 1182.0 |
| 22930 | 9.0 | 8.0 | 30.0 | 1179.0 |
| 13179 | 5.0 | 13.0 | 29.0 | 1179.0 |
| 8180 | 3.0 | 13.0 | 30.0 | 1179.0 |
| ... | ... | ... | ... | ... |
| 2601 | 1.0 | 2.0 | 1.0 | 81.0 |
| 7600 | 3.0 | 2.0 | 0.0 | 81.0 |
| 52 | 0.0 | 1.0 | 2.0 | 78.0 |
| 5051 | 2.0 | 1.0 | 1.0 | 78.0 |
| 10050 | 4.0 | 1.0 | 0.0 | 78.0 |
| 12500 | 5.0 | 0.0 | 0.0 | 75.0 |
| 7501 | 3.0 | 0.0 | 1.0 | 75.0 |
| 2502 | 1.0 | 0.0 | 2.0 | 75.0 |
| 200 | 0.0 | 4.0 | 0.0 | 72.0 |
| 2650 | 1.0 | 3.0 | 0.0 | 69.0 |
| 101 | 0.0 | 2.0 | 1.0 | 66.0 |
| 5100 | 2.0 | 2.0 | 0.0 | 66.0 |
| 2551 | 1.0 | 1.0 | 1.0 | 63.0 |
| 7550 | 3.0 | 1.0 | 0.0 | 63.0 |
| 5001 | 2.0 | 0.0 | 1.0 | 60.0 |
| 2 | 0.0 | 0.0 | 2.0 | 60.0 |
| 10000 | 4.0 | 0.0 | 0.0 | 60.0 |
| 150 | 0.0 | 3.0 | 0.0 | 54.0 |
| 2600 | 1.0 | 2.0 | 0.0 | 51.0 |
| 5050 | 2.0 | 1.0 | 0.0 | 48.0 |
| 51 | 0.0 | 1.0 | 1.0 | 48.0 |
| 7500 | 3.0 | 0.0 | 0.0 | 45.0 |
| 2501 | 1.0 | 0.0 | 1.0 | 45.0 |
| 100 | 0.0 | 2.0 | 0.0 | 36.0 |
| 2550 | 1.0 | 1.0 | 0.0 | 33.0 |
| 1 | 0.0 | 0.0 | 1.0 | 30.0 |
| 5000 | 2.0 | 0.0 | 0.0 | 30.0 |
| 50 | 0.0 | 1.0 | 0.0 | 18.0 |
| 2500 | 1.0 | 0.0 | 0.0 | 15.0 |
| 0 | 0.0 | 0.0 | 0.0 | 0.0 |
11826 rows × 4 columns